Project Description
The system utilises a high capacity data back-end that can take input from real time monitoring systems or synthetic data and pass it through to the virtual environment. In a reciprocal fashion changes made by the host user to the system can be output to real world systems or as input to a synthetic environment.
The system is data agnostic in this respect and can simultaneously communicate with real world systems or models to provide a seamless experience for the users.
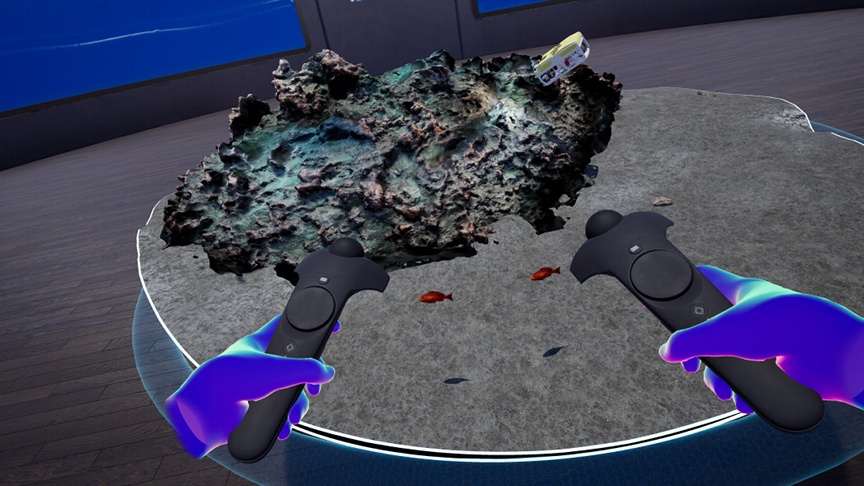
This is a new way of viewing data bridging the divide between spatial data and 3-D representations of these data when they are varying in the time domain.
It is possible to interpolate real time data inputs, assess their confidence limits, apply filters or constraints, control machinery, task or re-task autonomous vehicles no matter where those assets are located all in collaboration with one’s colleagues wherever they happen to be.
This means that in one shared environment you can undertake rapid assessment and modelling of:
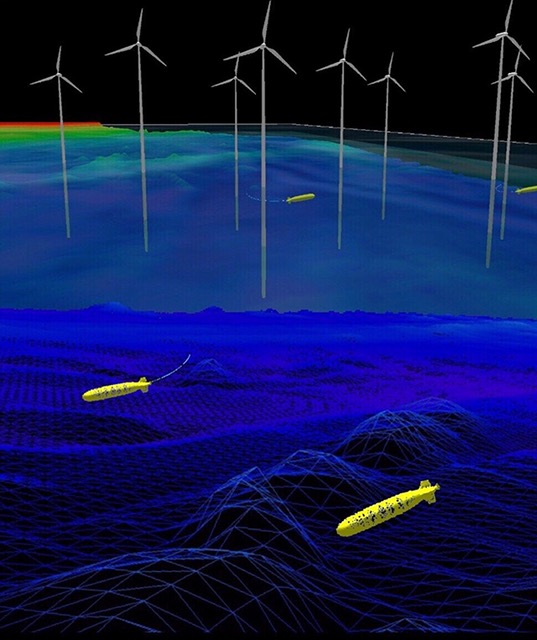
● Physical oceanographic conditions
● Autonomous vehicle behaviour
● Manipulate the communications environment
● Assess third party vehicle behaviours and potential vessel interaction
● Assess sensor performance
● Assess system performance
Applications include
● Mission rehearsal and execution
● Concept and feasibility analysis
● System design, integration and test
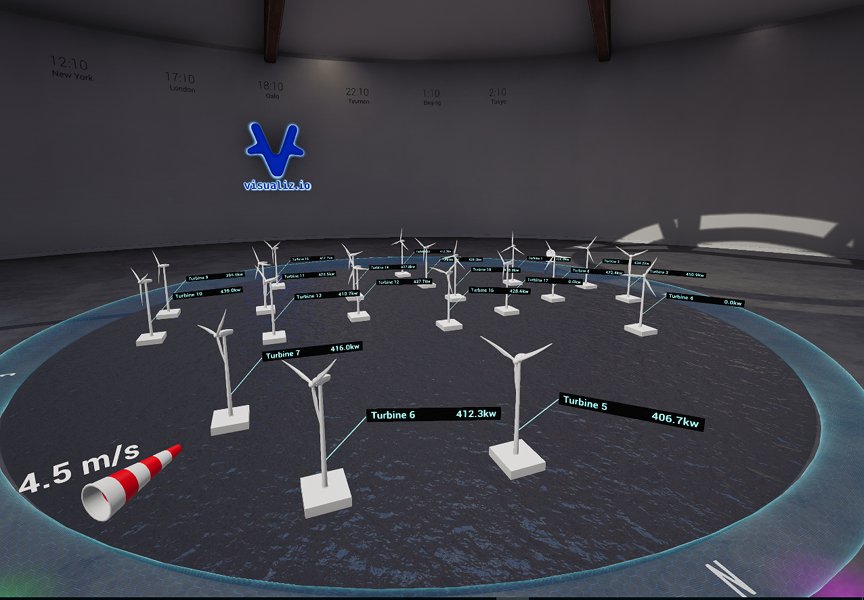
● Condition monitoring across a wide field installation
● Fault finding and diagnosis